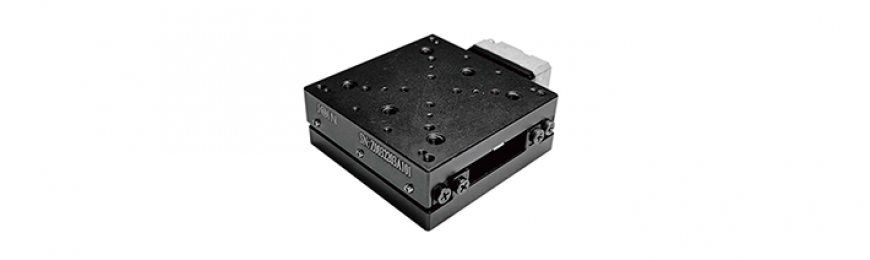

纳米位移台控制失灵、启停异常日常运维技巧
在高频次连续精密作业当中,纳米位移台时常出现操控指令响应迟缓、无故停机、无法正常启停、运行中途骤停等异常状况,直接打乱整体作业节奏,降低生产调校效率,这类常见故障依靠日常基础排查与规范养护,大多都能快速处理解决,无需拆机大修。
下达移动指令后设备反应迟钝、迟迟不启动运行,优先排查供电与线路连接情况...
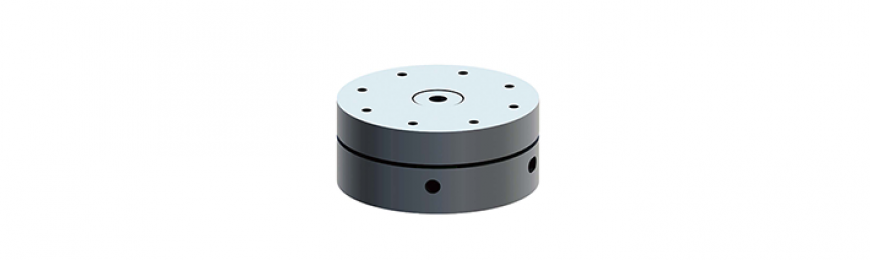
纳米位移台运行偏移、定位不准调整解决方法
纳米位移台凭借超高移动能力,广泛应用于精密对位、微加工调校、高精度检测校准等工业精密作业场景,依靠稳定传动结构实现微小行程精准把控,是精细加工流程里常用的配套传动设备。设备长时间往复运转使用后,容易出现走位偏差、定点位置偏移、多次移动落点不一致等情况,大多不是设备硬件出现损坏,而是安装固定不稳、...
纳米位移台运行卡顿、驱动报错实用排查技巧
在连续高频精密作业中,纳米位移台常会出现移动卡顿、启停反应迟缓、控制系统弹窗报错、无法正常启停等故障,直接影响整体作业进度,多数常见故障无需拆机检修,依靠基础排查与日常维护就能快速解决恢复使用。
设备移动卡顿、行进过程阻滞不顺,首要排查异物阻挡与润滑状态。长时间作业产生的碎屑落入运动缝隙,极易卡住...

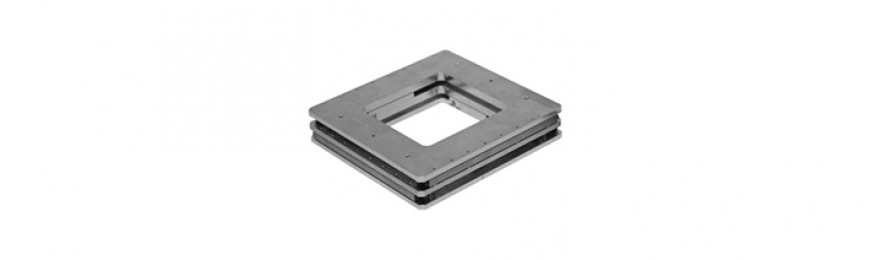
纳米位移台定位偏移、重复精度不足解决方法
纳米位移台凭借超高运动精度与平稳传动特性,广泛应用于精密对位、微纳加工、精准检测等工业精密作业场景,依靠闭环控制实现微小行程精准移动,是高精度工况里常用的传动定位组件。设备长期往复运行后,容易出现定位不准、返程偏差大、定点位置漂移等问题,大多源于外部环境影响、使用调试不当以及日常养护疏漏,通过常...

纳米位移台是什么?精密定位领域核心装备应用详解
在高端制造、精密检测与自动化升级的浪潮下,纳米位移台作为实现纳米级准确定位与运动控制的核心装备,凭借其超高精度、快速响应、稳定可靠的核心特性,打破了传统位移设备的精度局限,成为各类精密设备的关键组成部分,广泛应用于半导体制造、激光加工、精密检测等高端场景,为高精度运动控制提供了不可或缺的技术支撑...

纳米位移台使用技巧及品牌适配指南
精密定位是高端制造、精密检测、自动化生产等领域的核心需求,而纳米位移台的出现,重构了精密运动控制的工艺模式,以其纳米级定位精度、快速响应能力与广泛适配性,成为连接设计需求与实际生产的关键桥梁,无需复杂的操作与维护团队,即可实现高效、准确的运动控制,为各领域的技术升级与质量管控提供了有力支撑,推动...